ロボット実践教材
22/132
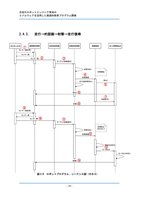
次世代ロボットエンジニア育成の ミドルウェアを活用した実践的教育プログラム開発 - 20 - 2.4.3. 走行→的認識→射撃→走行復帰 遠隔操作制御センサー入力本体状態認識移動制御サーボ制御出力射撃判定制御センサー値取得()ターゲット距離通知()射撃判定()射撃命令()射撃()センサー値取得()ターゲット距離通知()射撃判定()移動方向命令()移動()射撃開始射撃停止(的がない)センサー値センサー値射撃情報2打以降射撃待ち()センサー値センサー値射撃情報モータ出力モータ出力判定( )停止()停止() 図2-9 ロボットプログラム:シーケンス図(その3) ① ② ③ ④ ⑤ ⑥ ⑧ ⑨ ⑩ ⑪ ⑫ ⑦ ⑬ ⑭
元のページ